一种允许机器人重新识别和跟踪人类用户的新模型
近年来,机器人专家和计算机科学家引入了各种新的计算工具,可以改善现实世界中机器人和人类之间的交互。这些工具的最终目标是让机器人对它们所协助的用户更加敏感和协调,这反过来又可以促进它们的广泛采用。
意大利莱昂纳多实验室和意大利理工学院(IIT)的研究人员最近推出了一种新的计算框架,允许机器人识别特定用户并在给定环境中跟随他们。该框架是在2023年IEEE国际先进机器人及其社会影响会议(ARSO)上发表的一篇论文中介绍的,它允许机器人重新识别周围环境中的用户,同时还可以根据机器人执行的手势执行特定操作。用户。
“我们的目标是创建一个突破性的演示,以吸引利益相关者来到我们的实验室,”进行这项研究的研究人员之一费德里科·罗洛(FedericoRollo)告诉TechXplore。“跟随机器人是许多商业移动机器人中的普遍应用,特别是在工业环境中或用于协助个人。通常,此类算法使用外部蓝牙或Wi-Fi发射器,这可能会干扰其他传感器,并且需要用户携带。”
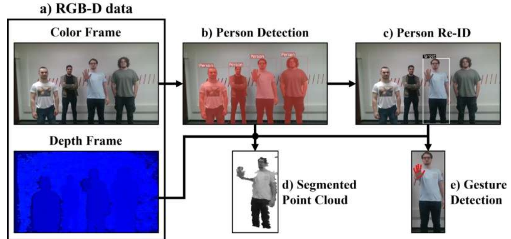
Rollo和他的同事最近工作的主要目标是创建一个重新识别模型,可以识别RGB相机记录的图像中的特定目标。RGB相机是机器人领域最常用的传感器之一,因此它们非常容易采购并与现有机器人系统集成。
“我们开发的重新识别模块包括两个连续的步骤:校准步骤和重新识别步骤,”罗洛解释道。
“在校准步骤中,要求目标人在机器人面前随机移动。在此阶段,机器人利用神经网络来检测人并以网络嵌入的形式学习他们的外观(想象一个抽象向量)代表人的特征)。然后使用这些嵌入来创建代表目标的统计模型。”
在处理的第二阶段,研究人员创建的模块会在目标在周围环境中自然移动时重新识别目标。该框架通过分析一个或多个RGB摄像头获取的图像、检测这些图像中的人物、计算他们的特征,并将这些特征与在校准阶段创建的目标用户模型中概述的特征进行比较来实现这一目标。
罗洛说:“如果某些特征在统计上与模型匹配,那么具有这些特征的人就会被选为目标。”“然后,该信息被发送到定位模块,该模块计算目标用户的3D位置,并向机器人发送速度命令,使其朝他/她移动。此外,该应用程序还包括手势检测模块。”
Rollo和他的同事创建的手势检测模型可以检测目标用户的特定手势,并向与这些手势一致的机器人发送命令。例如,如果用户将张开的手放在机器人的视野前面,就会触发停止命令,指示机器人停止。相反,如果用户伸出一只闭合的手,机器人将再次开始操作。
到目前为止,研究人员使用RobotnikRB-Kairos+机器人在一系列实验中测试了他们的框架。这是一种移动机器人操纵器,设计主要用于工业环境,例如仓库和制造现场。
罗洛说:“即使在拥挤的区域,重新识别模块在测试过程中也表现出了非凡的稳健性。”“这种强大的行为开辟了各种实际应用。例如,它可以用于在工业环境中移动高负载物体,在协作或工业环境中引导机器人到不同的站点,或者帮助老年人在一个房间内重新安置他们的物品。家。”
该研究团队开发的新的重新识别和手势检测框架很快就会在需要移动机器人跟随人类并自动运输物品的各种现实场景中得到应用和进一步测试。然而,在大规模部署之前,罗洛和他的同事计划克服在最初实验中发现的模型的一些局限性。
“一个值得注意的限制是,在校准阶段获得的统计模型在重新识别期间保持不变,”罗洛补充道。
“这意味着,如果目标改变了外观,例如穿不同的衣服,算法将无法适应并需要重新校准。此外,人们对探索新方法以使神经网络本身识别目标表示有兴趣,可能利用持续学习方法。这可以增强目标模型与从RGB图像中提取的特征之间的统计匹配,从而提供更具适应性和灵活性的系统。”
免责声明:本答案或内容为用户上传,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。 如遇侵权请及时联系本站删除。