在地理空间探索中,通过视觉主动搜索(VAS),对感兴趣区域的有效识别最近取得了飞跃。该建模框架使用视觉线索来指导探索,其潜在应用范围包括从野生动物偷猎检测到搜救任务再到识别非法贩运活动。
圣路易斯华盛顿大学麦凯维工程学院开发的一种新的VAS方法将深度强化学习(计算机可以通过反复试验学习做出更好的决策)与传统的主动搜索(人类搜索者外出验证)相结合选定区域中有什么。
开发新型VAS框架框架包括计算机科学与工程教授YevgeniyVorobeychik和NathanJacobs,以及计算机科学与工程教授AnindyaSarkarVorobeychik实验室的博士生。该团队于12月13日在新奥尔良举行的神经信息处理系统会议上展示了其研究成果。
“VAS对传统主动搜索的改进或多或少取决于搜索任务,”雅各布斯说道。“如果一项任务相对容易,那么改进就很有限。但是,如果某个物体非常稀有,例如,我们出于野生动物保护目的而想要定位的濒临灭绝的物种,那么VAS提供的改进是巨大的。值得注意的是,这并不是为了更快地找到东西。这是在考虑到有限的资源,尤其是有限的人力资源的情况下,找到尽可能多的东西。”
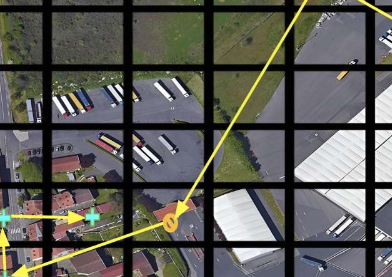
该团队的VAS框架通过将搜索分解为两个不同的模块来改进以前的方法。该框架首先使用预测模块根据地理空间图像数据和搜索历史生成感兴趣区域。然后,搜索模块将生成的预测图作为输入并输出搜索计划。每个模块都可以随着人类探索者实时返回物理搜索结果而更新。
“分解为两个模块,而不是端到端的搜索策略,使我们的适应性更强,”萨卡说道。在实际搜索过程中,我们可以使用搜索结果更新我们的预测模块。然后,搜索模块可以了解预测模块的动态(它在搜索步骤中如何变化)并进行调整。在这个元学习策略中,搜索模块基本上是学习如何搜索。它也是人类可解释的,因此如果模型无法正常工作,用户可以根据需要进行检查和调试。”
该框架的主要优势在于它不断整合两个部署级别:计算模型预测搜索位置,然后由人类预测到外面的世界去进行搜索。就探索大型地理空间区域所需的时间和其他资源而言,人力成本要高得多,因此调整和优化计算机生成的搜索计划以实现最高效的搜索是有意义的。
当寻找的对象与模型训练的对象有很大差异时,计算机模型的适应性尤其重要。实验结果表明Sarkar、Vorobeychik和Jacobs的实验取得了显着的进步。在各种视觉主动搜索搜索任务中,针对现有方法提出了VAS框架。
研究结果已发布在arXiv预印本服务器上.
标签:
免责声明:本文由用户上传,如有侵权请联系删除!