机器人系统已被引入许多现实环境中,包括一些工业和制造设施。在这些设施中,机器人可以协助人类装配线和仓库工人,高精度地组装产品的某些部件,然后将它们交给负责执行其他操作的人类代理。
近年来,机器人专家和计算机科学家一直在尝试开发日益先进的系统,以增强工业环境中机器人与人类之间的互动。一些提出的解决方案依赖于所谓的“数字孪生”。系统,虚拟模型旨在准确地再现物理对象,例如正在制造的特定产品或组件。
中国南京航空航天大学的研究人员最近推出了一种新的数字孪生系统,可以改善制造环境中人类和机器人代理之间的协作。该系统在机器人与计算机集成制造发表中介绍>,可以创建现实世界环境的虚拟地图,以在机器人与人类合作完成给定任务时规划和执行适当的机器人行为。
“在工业环境中,当前构建人体数字孪生模型的方法依赖于动作捕捉设备,需要人员佩戴笨重的设备,这违背了HRC倡导的灵活交互原则,”张泽群、纪雨辰和他们的同事在论文中写道。
此外,目前的方法并没有在统一的空间中对人类和机器人进行建模,这既不直观,也不方便感知和理解整体环境。为了解决这些限制,本文提出了一种HRC数字孪生系统。
张、季及其同事创建的数字孪生系统创建了人类和机器人代理协作场景的虚拟复制品。随后,它规划有效的协作策略并在现实环境中执行它们。
人们发现,先前提出的依赖于运动捕捉传感器收集的数据的数字孪生系统有时在存在遮挡的情况下(即,当感兴趣的物体或代理位于传感器视野之外或被隐藏时)会获得不令人满意的结果。障碍物后面)。研究人员因此开发了一种人体网格恢复算法,这是一种可以帮助重建被遮挡的人体的计算技术。
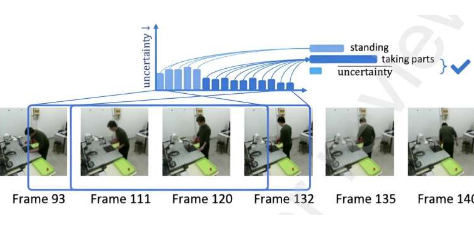
此外,Zhang、Ji和他们的同事在他们的系统中引入了一种不确定性估计技术。这项技术使他们能够通过控制算法出错的风险来增强动作识别算法的性能,动作识别算法是他们的系统的一个组件,经过训练可以识别不同的人类动作。
研究人员使用设计用于工业环境中部署的机器人,在实验室环境中进行了一系列实验,评估了他们的新数字孪生系统。他们的系统被发现可以增强机器人和人类代理在各种任务中的协作,包括涉及抛光、拾取、组装和放置物体的任务。
“实验结果证明了所提出的方法相对于基线方法的优越性,”张、吉和他们的同事说。“最后,通过涉及部件组装的案例研究验证了HRC系统的可行性和有效性。”
张、吉和他们的同事开发的数字孪生系统很快就会在其他工业用途机器人上实施,并在额外的实验中进一步测试,最终可以将其引入现实世界中,以增强机器人与人类之间的协作各种制造和工业任务。
标签:
免责声明:本文由用户上传,如有侵权请联系删除!