触觉感知系统能够为机器人和可穿戴设备等需要实时触觉数据的物体提供类似人类的多模式触觉信息。
研究人员受人类触觉感知的启发,开发了一种实时、多模态的触觉感知系统,能够实时提供多触觉信息,并公布了软机器人领域的研究成果。
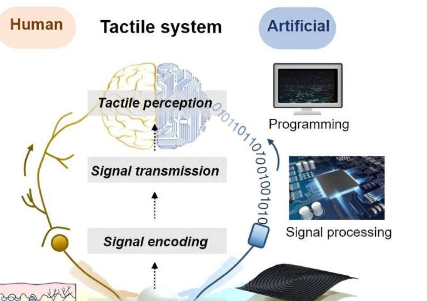
研究团队通过模仿人体皮肤中多种感觉受体感知各类触觉信息并实时传输至大脑的原理,开发了一种实时、多模态的触觉检测系统。
该系统由四个三维堆叠触觉传感器、信号处理/传输模块和分析模块组成。该系统成功区分了各种类型的触觉刺激和表面纹理,此外还实时区分了复杂的运动。
四种类型的触觉传感器,每种都检测温度、振动、剪切力和垂直压力,基于三维(3D)柔性电极印刷工艺技术层叠在三维结构中。
同时,这些传感器与电子模块的FPCB(柔性印刷电路板)连接,进行信号处理和传输,从而通过相应的FPCB连接端子轻松传输信号处理后的触觉信息。
在之前的研究中,需要复杂的外部测量设备和分析设备来检测相应设备产生的信号,从而可以检测到各种形式的触觉刺激。因此,很难将这些设备以简单的独立系统的形式应用于可穿戴设备或机器人。
另一方面,在新开发的多模态触觉感知系统中,多种类型的触觉传感器以三维结构垂直排列。此外,还开发了能够转换、传输和分析信号的模块,使得系统能够以紧凑而简单的形式实现,并使其适用于实际的机器人和可穿戴设备。
该研究团队由纳米融合制造系统研究部研究主任HyuneuiLim和韩国机械材料研究院自然启发系统与应用系首席研究员YoungdoJung领导。科学和信息通信技术部。
Lim表示:“通过模仿人类的感官系统,实时多模态触觉感知系统能够同时感知多种感官。此外,它是一项解决了复杂和大信号处理和处理可能带来的问题的技术。”使用传统传感器时的检测系统。”
“通过将该系统应用于机器人或可穿戴设备,我们将能够获得大量多样且复杂的触觉信号信息,这有望为改善公共福利和安全做出贡献。”
标签:
免责声明:本文由用户上传,如有侵权请联系删除!